5/6 线性系统的频域分析法(下)
线性系统的稳定性分析
频率域稳定判据
推导
总结:
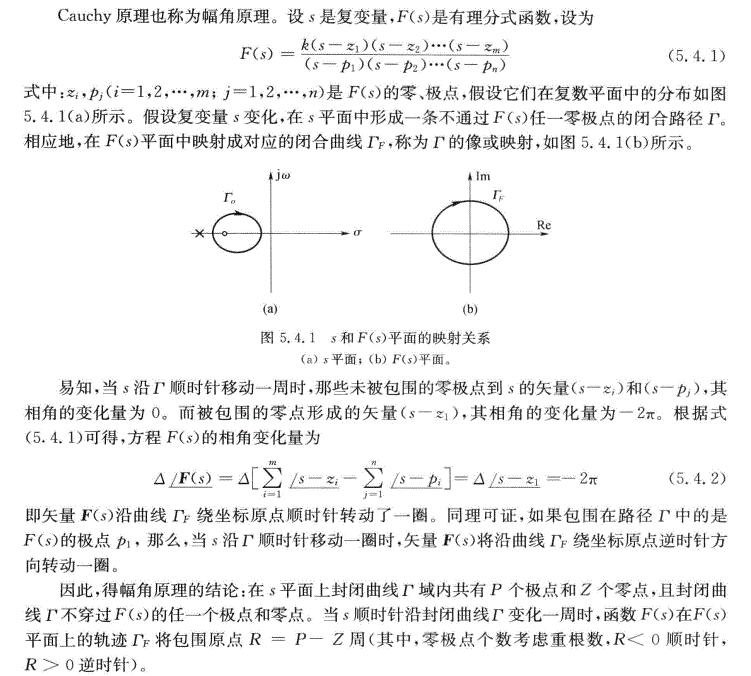
- 对于每一个s,函数F(s)都有唯一的一个值与之对应,称为映射。s平面的曲线也与F(s)平面曲线相对应。
- 若s平面的曲线不包围F(s)的零点和极点,则F(s)平面曲线不包围原点,且
Гs顺时针时,Г_F也顺时针。- 若s平面的曲线Гs
顺时针包围F(s)的Z个零点,Г_F也顺时针包围原点Z次;若s平面的曲线Гs顺时针包围F(s)的P个极点,Г_F则逆时针包围原点P次;重根应重复计算。- 幅值原理。
线性系统的开环传递函数是有理分式函数,设
对应的闭环传递函数为
取F(s)为以下形式
所以,F(s)的零点是闭环传递函数的极点,F(s)的极点是开环传递函数G(s)H(s)的极点。当系统稳定时,闭环传递函数的所有极点(闭环极点)应位于复平面的虚轴左边,即s右半平面没有闭环极点,等价于F(s)在s右半平面里没有零点。
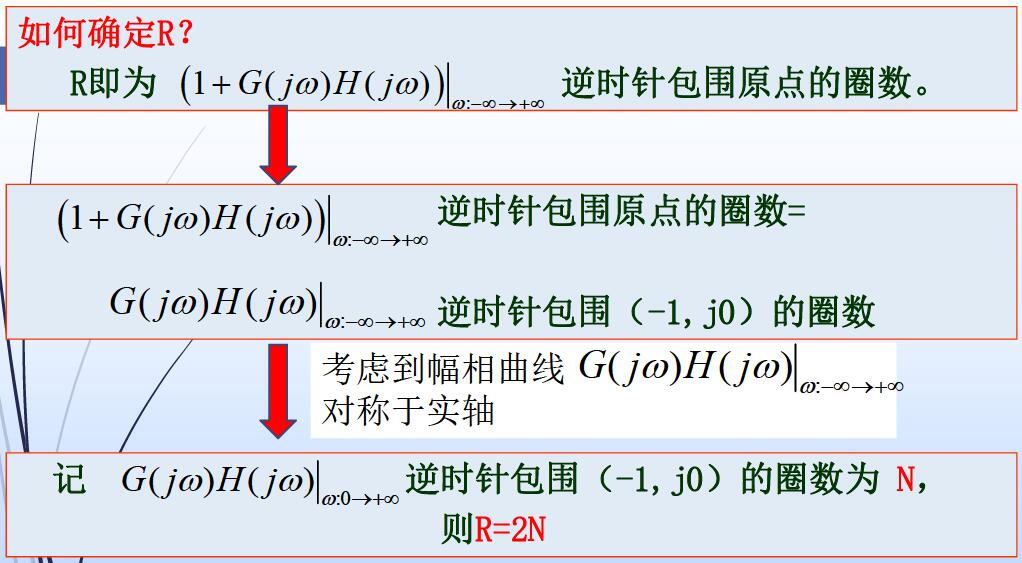
根据幅角原理,零点数Z有
其中,P为F(s)的极点数,R为F(s)逆时针包围原点的圈数。
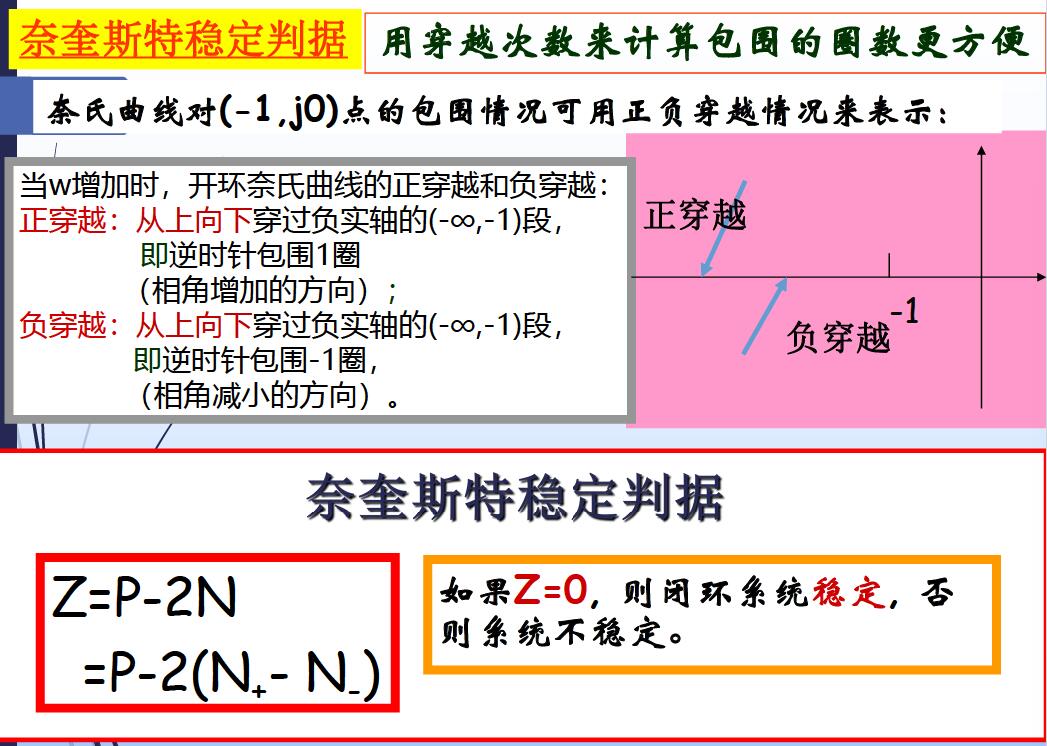
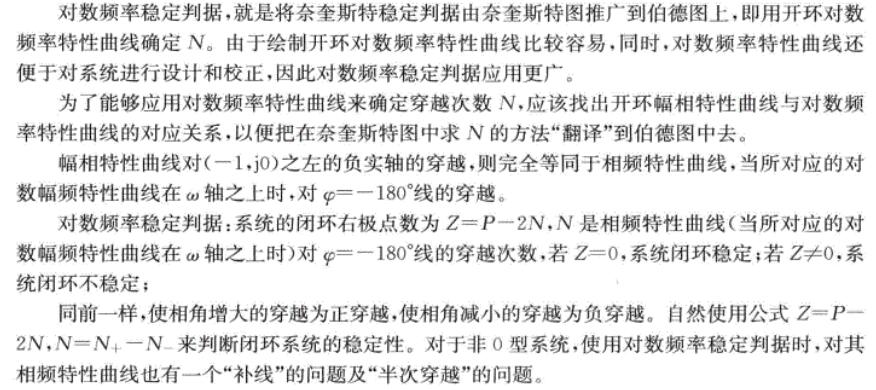
奈奎斯特稳定判据
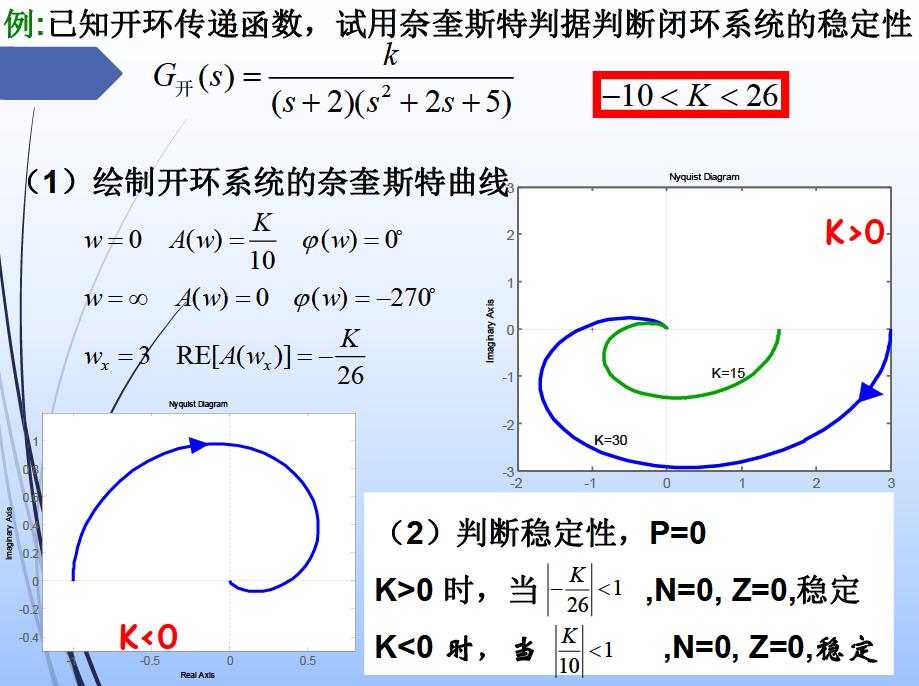
因为F(s)=1+G(s)H(s),所以将F(s)左移一个单位即开环传递函数,F(jw)逆时针包围原点就可以等价为开环传递函数G(jw)H(jw)环绕(-1.j0)点。故,引出奈奎斯特稳定判据:
式中,Z:右半平面闭环极点数,P:右半平面开环极点数(开环不稳定极点数),N:开环系统奈氏曲线G(jw)H(jw)在w从0到∞时,逆时针环绕(-1.j0)点次圈数。如果Z=0,则闭环系统稳定,否则系统不稳定。
补充说明:
- N=N±N_,N+为自上而下的穿越(相角增大的方向)为
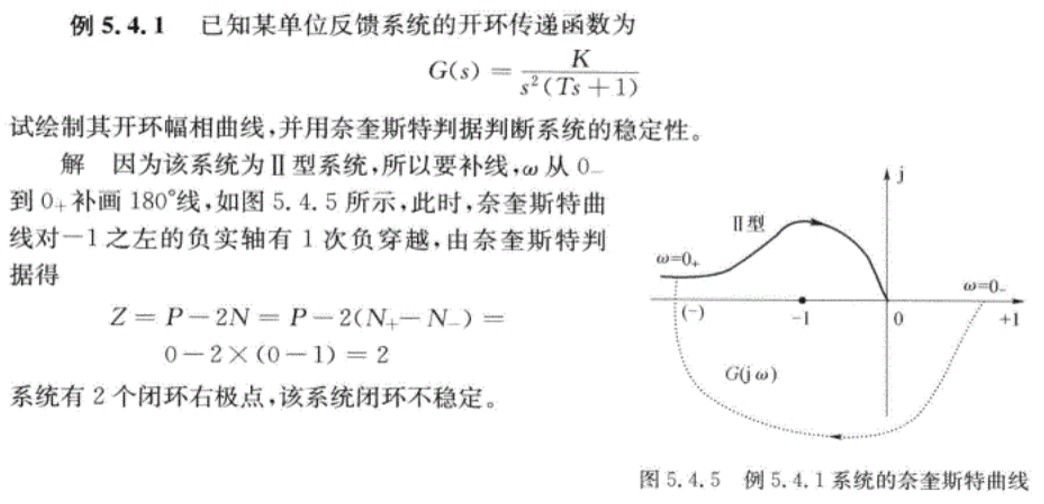
正穿越;N-为自下而上的穿越(相角减小的方向)为负穿越。 - 若0型以上的系统,奈奎斯特曲线则需要
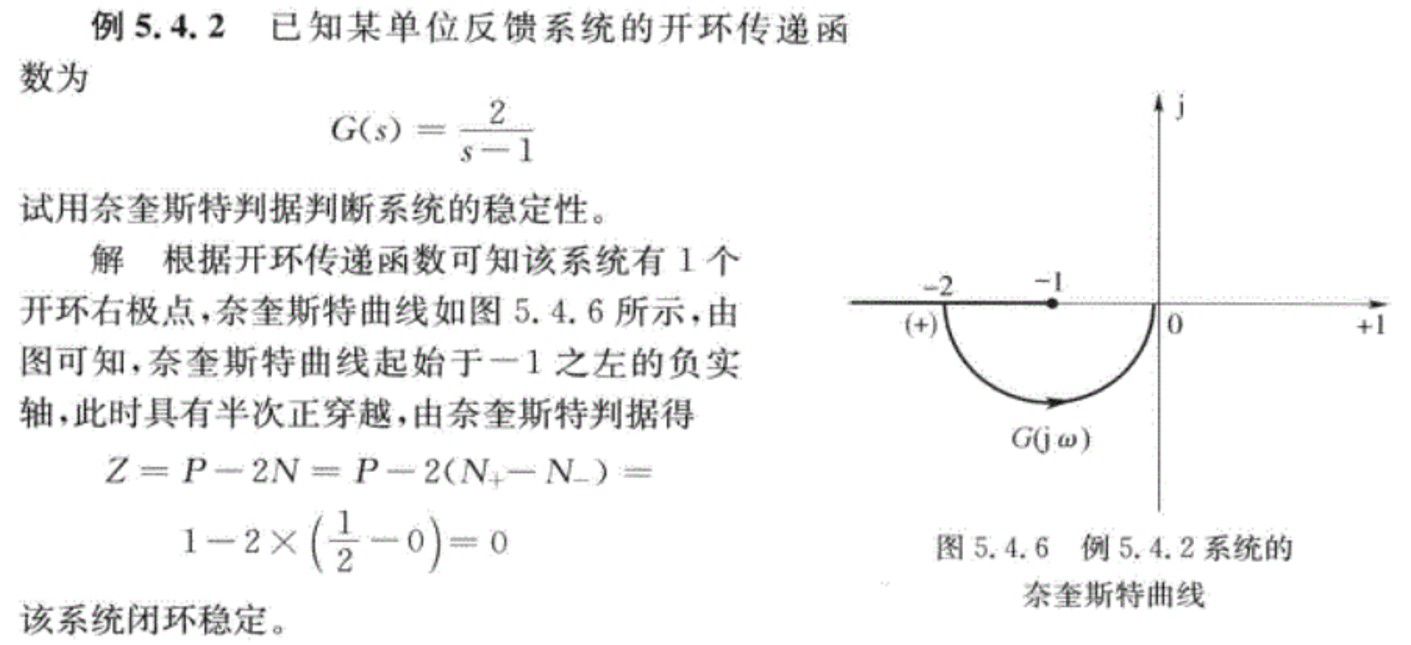
补线,应自G(jw)曲线的G(jw)|_{w=0+}起,沿逆时针方向补画一个半径为无穷大,角度为v×90°的圆弧,为统一奈奎斯特曲线的方向,以顺时针方向标示箭头,作示意图时以虚线代表半径为无穷大的圆弧。 - 对于起点(或终点)位于一1之左的实轴的奈奎斯特曲线,称该曲线对负实轴进行了
半次穿越(正负规定同补充说明1)。
注:开环传递函数在s右半平面的极点数与系统是否稳定没有直接关系!
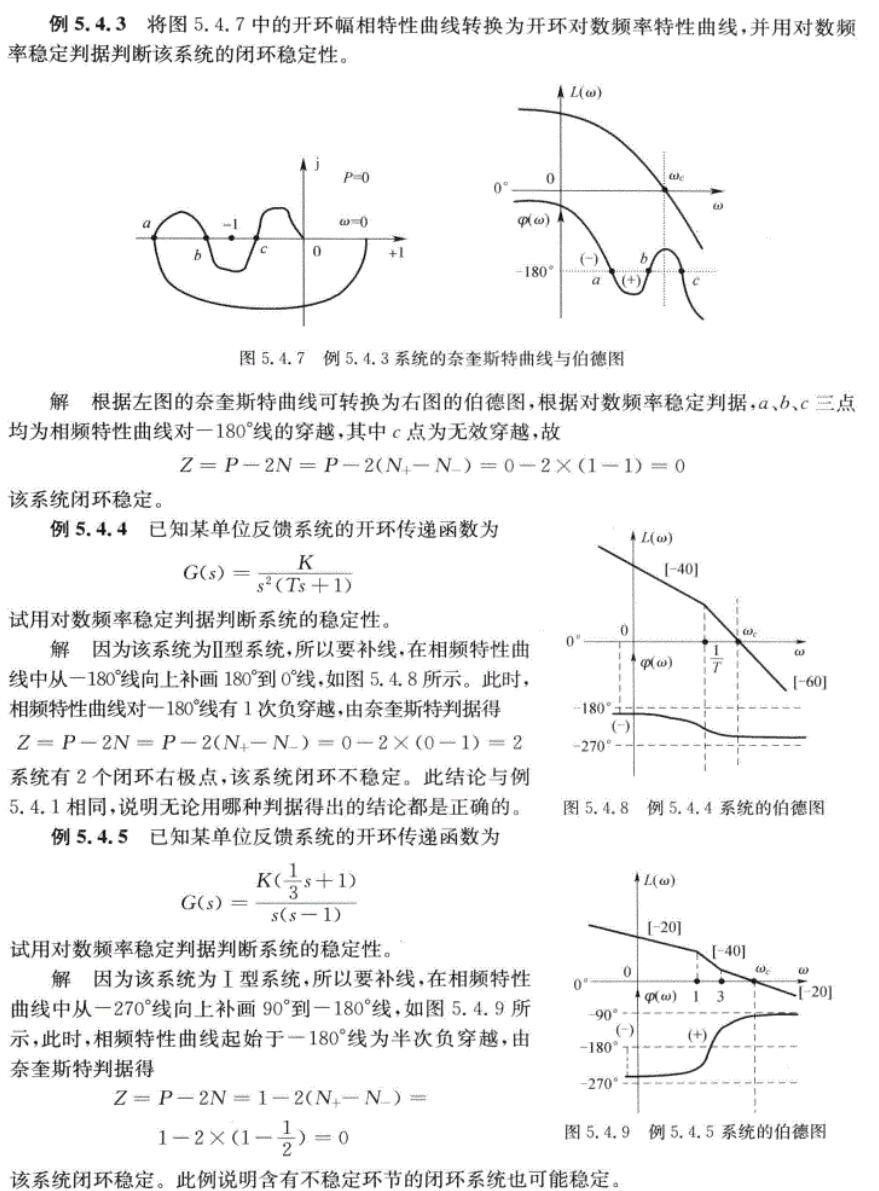
对数频率稳定判据
频域稳定裕度
要保证实际系统能够正常地工作,分析时,不仅要求系统稳定,而且还应具有一定的稳定裕度。系统的开环幅相曲线接近(-1,j0)点的程度,就反映了系统稳定的程度。开环幅相曲线越接近(-1,j0)点,系统的稳定程度越差。
| 稳定边界 | 稳定裕度 | |
|---|---|---|
| 时域 | 虚轴 | s左半平面闭环极点到虚轴距离 |
| 频域 | (-1,j0) | 到(-1,j0)的距离 |
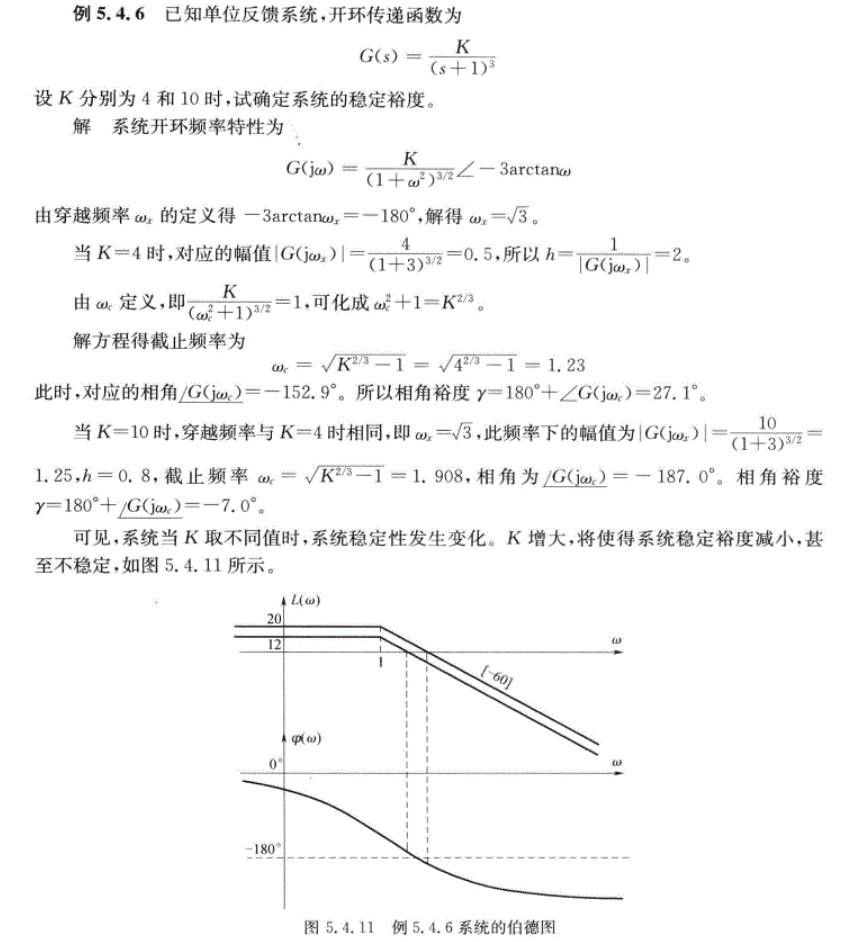
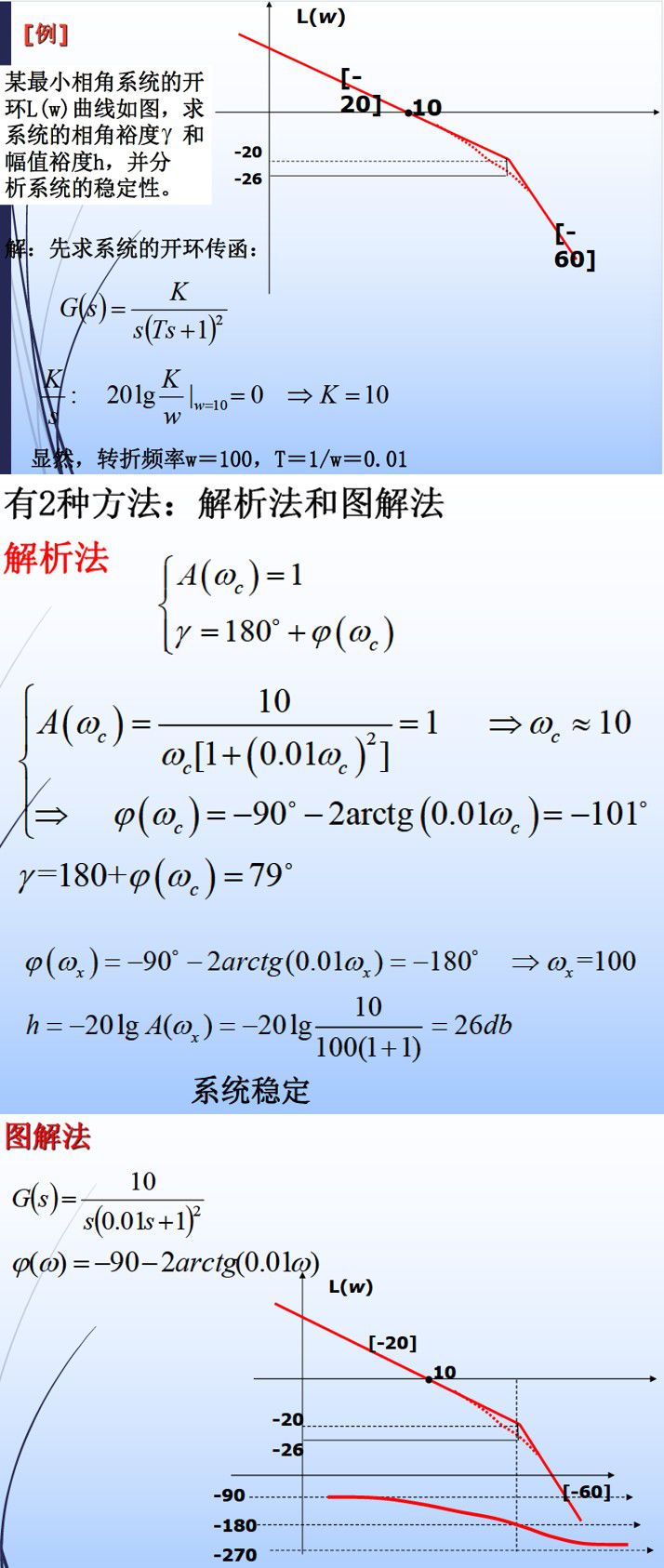
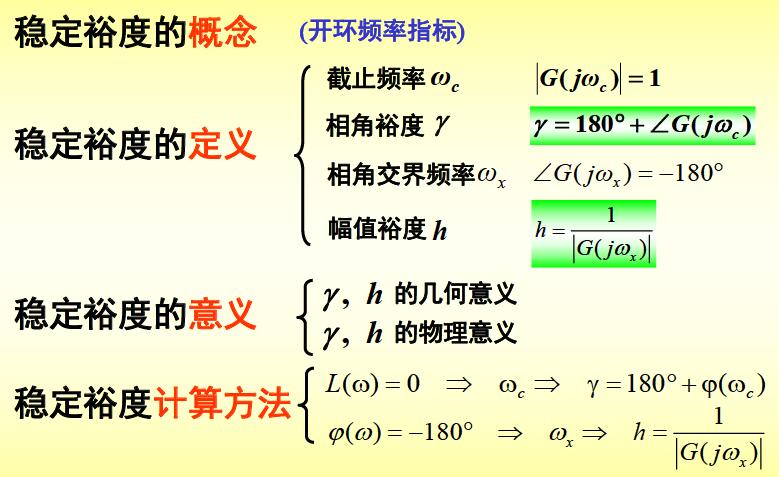
幅值裕度
使开环传递函数相角达到(2k+1)π的频率叫做穿越频率w_x。幅值裕度h:
幅值裕度表示了系统在幅值方面的稳定储备量,一般要求h>2
- h(dB)>0,L(w_x)为负值,系统稳定;
- h(dB)<0,L(w_x)为正值,系统不稳定;
- h(dB)=0,L(w_x)为0,系统临界稳定;
相角裕度
使得开环传递函数的幅值等于1的频率为截止频率w_c。相角裕度γ是系统由稳定达到临界稳定状态所需增加的相角滞后量。
幅值裕度表示了系统在相角方面的稳定储备量,一般要求γ>40°
- γ>0,表示奈奎斯特曲线未包围(-1,j0)点,系统稳定;
- γ<0,表示奈奎斯特曲线包围了(-1,j0)点,系统不稳定;
- γ=0,表示奈奎斯特曲线通过了(-1,j0)点,系统临界稳定;
设计控制系统时的目标:为了使系统具有足够的稳定裕度和获得良好的动态性能,一般要求相角裕度γ=30~70度,幅值裕度h=2~2.5或h(dB)=6~8。
Note 1:仅仅用相角裕度或仅仅用幅值裕度,都不足以说明系统的相对稳定性。只有同时给出相角裕度和幅值裕度时才能表明系统的相对稳定性,但是对于无零点的二阶系统和只要求粗略估算动态性能的高阶系统,一般只要相角裕度就足够了。
Note 2:一阶系统和二阶系统的相角裕度,幅值裕度总是大于0,而幅值裕度h=oo,因此,从理论上讲,系统不可能不稳定。
闭环系统的频域性能指标
控制系统的带宽
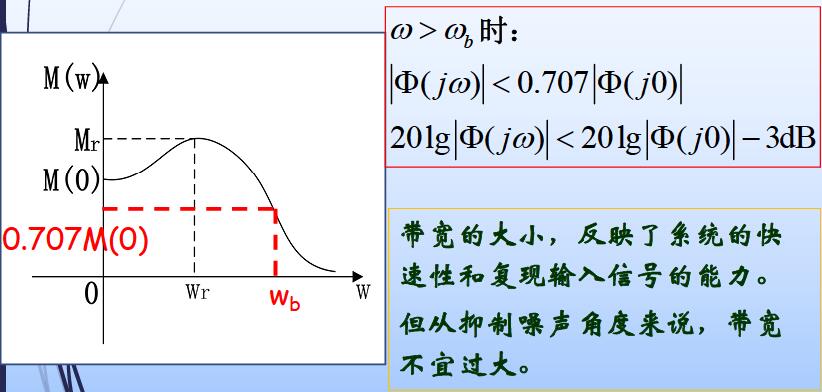
带宽频率:为幅频特性衰减到0.707M_0时所对应的频率,通常用w_b表示。
带宽:频率从0到w_b的频率范围,称为系统的带宽。带宽的大小,反映了系统的快速性和复现输入信号的能力。但从抑制噪声角度来说,带宽不宜过大。
二阶闭环系统频域性能指标和时域指标的转换
表示一下闭环频域指标——带宽、开环频域指标——相角裕量γ
当0<ζ<0.707时,幅频曲线有峰值出现,这时对应的峰值为谐振峰值M_r,对应的频率为谐振频率w_r。
- 已知M_r和σ%都随ζ增加而减小,所以同一系统,M_r和σ%有一致性,M_r增大时,σ%也增大。M_r可以看作是度量系统振荡程度的频域指标。
- 相角裕度γ和阻尼比ζ也是一一对应的关系,且ζ越大,γ越大。
- 二阶系统的调节时间t_s与截止频率w_c和相角裕度γ有关,截止频率w_c越大,调节时间t_s越小。

线性系统的频域法校正
根据校正装置在系统中的连接方式,分为串联校正和反馈校正两种。为了避免功率损耗,串联校正装置通常安置在前向通道偏差测量点之后和放大器之间,或安置在放大器之间。根据校正装置的特性,工程上常用的串联校正有串联超前校正,串联滞后校正和串联滞后-超前校正等。反馈校正装置接在局部反馈通道上,常用的反馈校正有比例反馈校正和测速反馈校正等。
开环系统的伯德图是分析和设计控制系统的重要工具。分析时可将开环对数幅频特性以穿越频率附近为中频段,低于中频的为低频段,高于中频的为高频段。开环系统的对数幅频特性曲线的低频段表征了系统的静态特性,中频段表征了系统的动态特性,而高频段则表征了系统的抗干扰能力。一个特性较好的系统,其各频段有以下特点:
(1)相角裕度γ为30°~60°;幅值裕度h>6dB,则系统的稳定性比较好。当中频段以一20dB/dec的斜率穿越零分贝线,而且这一斜率占有足够的频带宽度,系统会具有较好的稳定性;
(2)截止频率w_c越高,则系统的快速性越好;
(3)低频段的斜率陡,增益高,表示系统的稳态精度好;
(4)高频段衰减得越快,即高频特性负分贝值低,说明系统抗高频噪声干扰的能力越强。
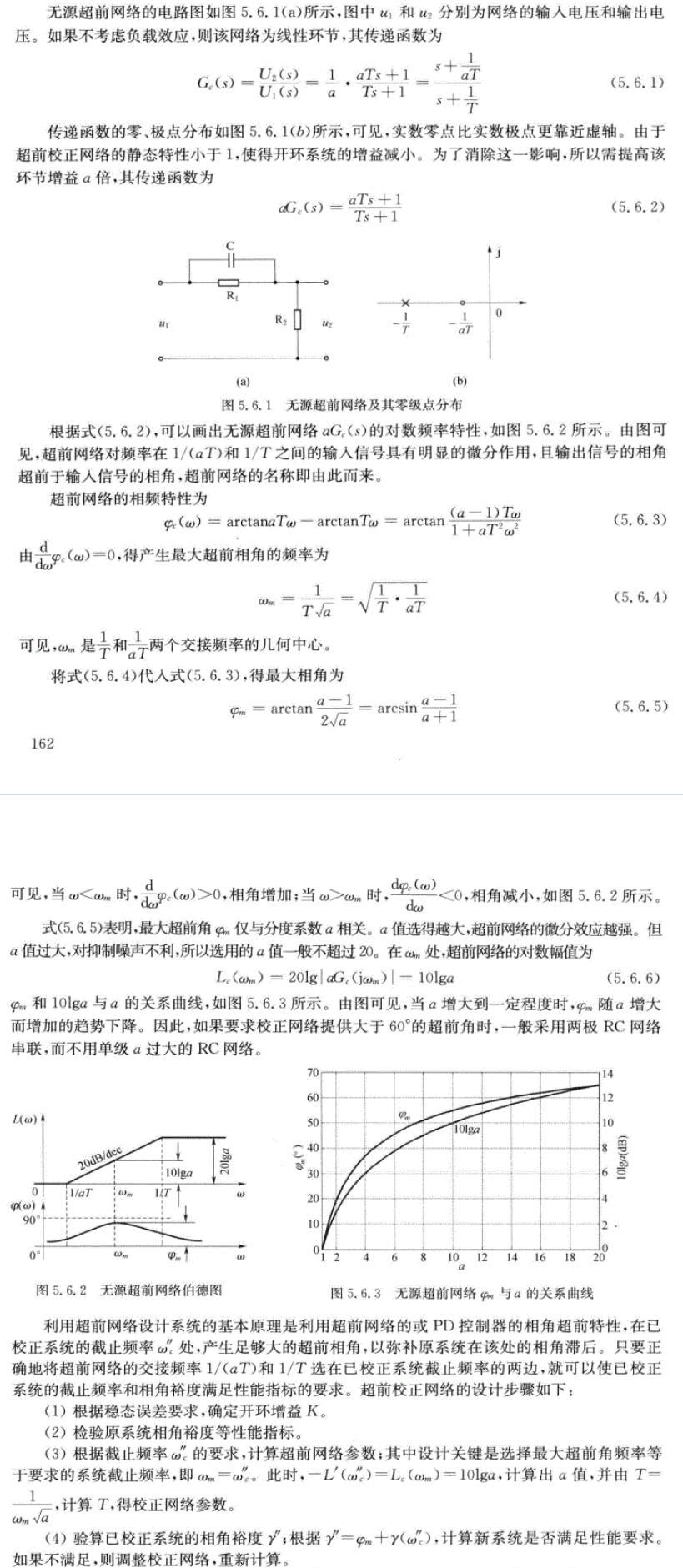
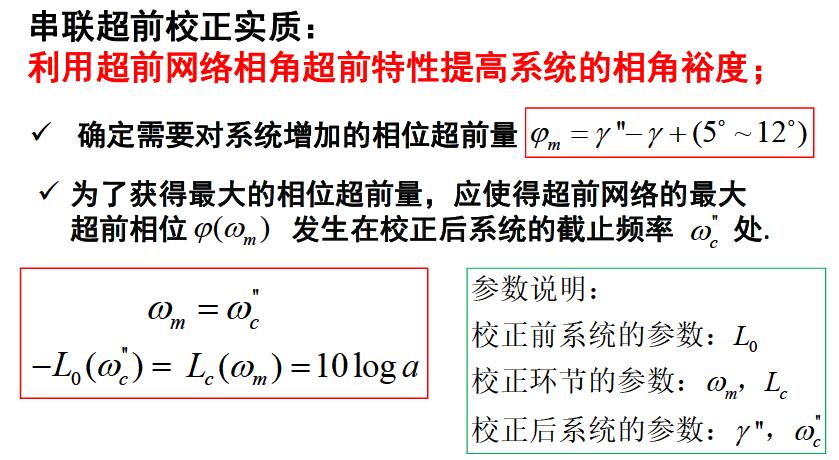
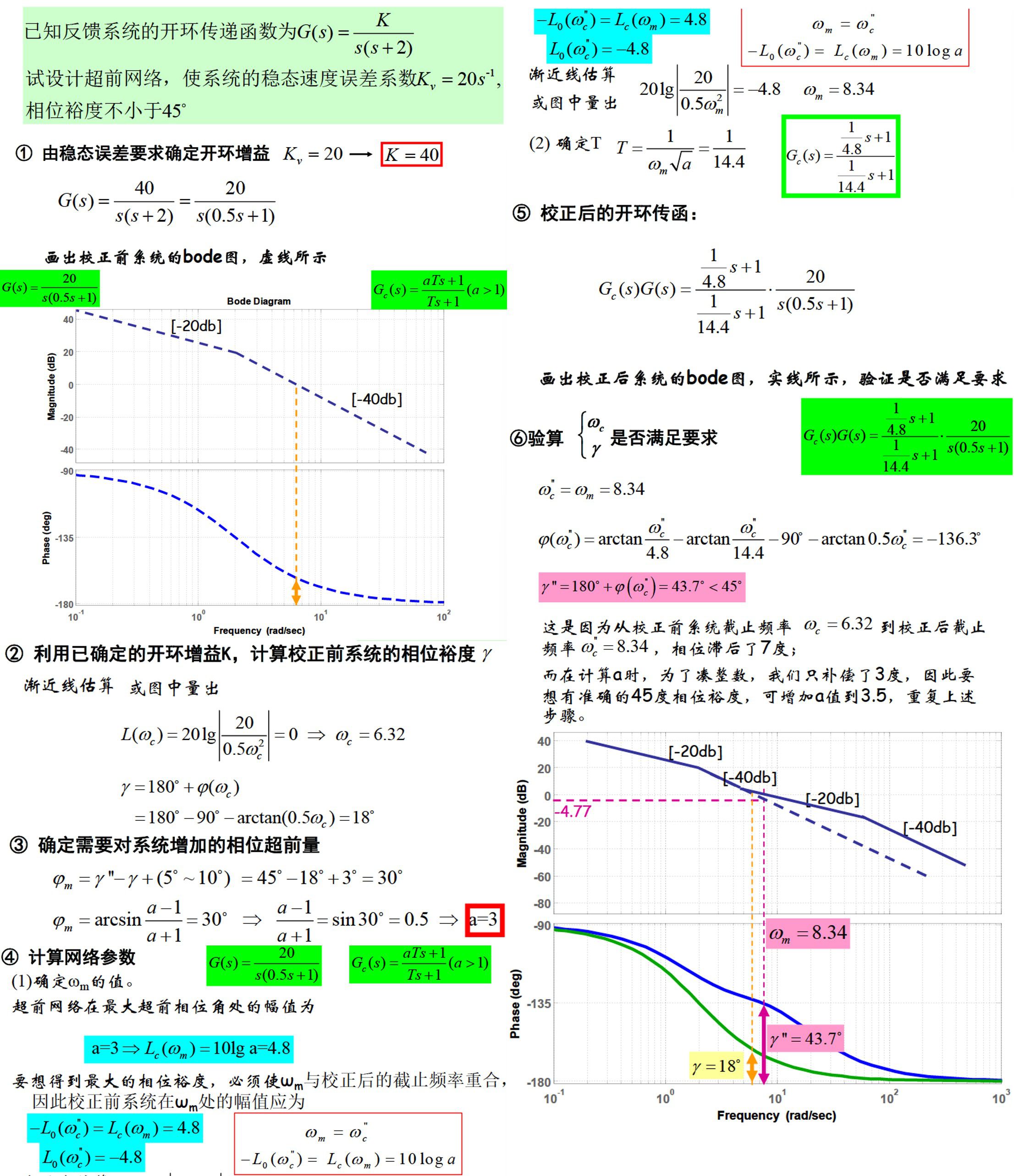
串联超前校正a>1
这里稍作解释:
- 原系统为G,对数幅值为L_0;
- 超前系统为G_c,有最大超前角频率w_m,且有L_c(w_m)=10lga;
- 校正后的系统则为G*G_c,有截止频率w_c’‘,则有L_0(w_c’‘)+L_c(w_c’')=0。
为了得到最大的相角裕度,应有w_m=w_c’'。所以两个方程可以反解出两个频率值。所以求解路线基本就是:
相角裕度增量(超前系统的最大相角)-a-最大超前角频率(新系统截止频率)中知道一个然后求剩下两个,进而确定周期T,就可以完整确定超前系统。
应当指出,在有些情况下,串联超前校正无效,它受以下两个因素的限制:
(1)闭环带宽要求。若待校正系统不稳定﹐需要超前网络提供很大的相角超前量,以致a必须很大,造成系统带宽过大,通过系统的高频噪声电平很高。
(2)在截止频率附近相角迅速减小的待校正系统,一般不宜采用串联超前校正。因为随着频率的增大,待校正系统相角迅速减小,超前校正网络难以较多地增大系统的相角裕度。此时,可以考虑用多个超前校正网络串联,或者是采用其他校正形式,如滞后校正。
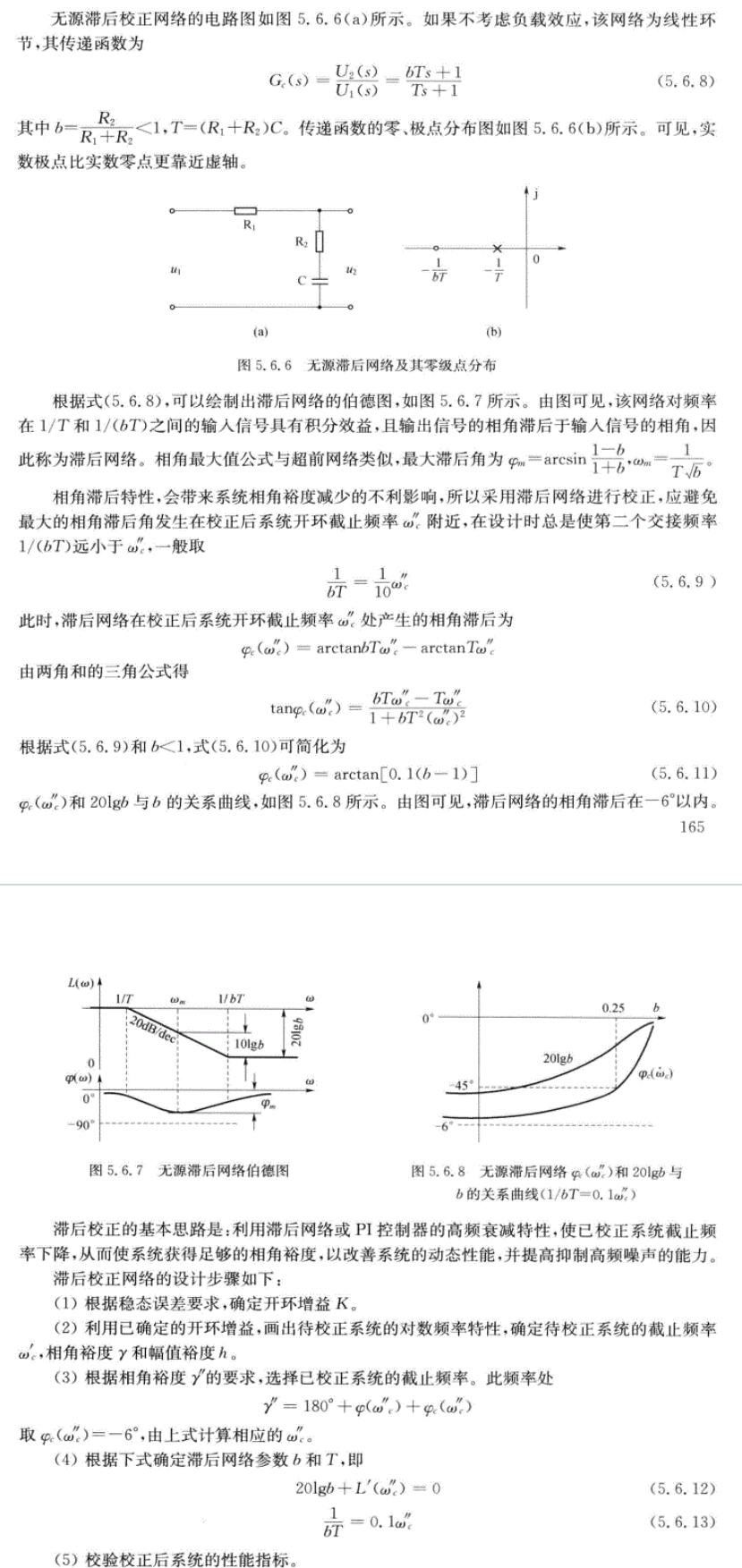
串联滞后校正b<1
超前、滞后校正的比较
- 超前校正利用其相位超前特性、获得系统所需要的相位超前量。而滞后校正则利用其高频衰减特性,使截止频率下降,借助于原系统在新的截止频率处的相位,获得系统所需要的相位裕度。
- 超前校正通常用来改善稳定裕度,滞后校正通常用来提高稳态精度。
- 超前校正比滞两个指标后校正提供更高的截止频率。高的截止频率意味着大的带宽,从而意味着小的调整时间。因此,如果希望系统具有大的带宽,或者快的响应,应采用超前校正。
- 超前校正需要由一个附加的增益增量,以抵消超前网络本身的衰减。则表明超前校正比滯后校正需要更大的增益。在多数情况下,增益越大,意味着系统的体积和重量越大, 成本越高,同时会在系统中产生比较大的信号,这种大信号容易造成元件的饱和现象。
- 滞后校正降低了系统在高频区的增益,但并没有降低系统在低频区的增益。因为降低了高频增益,系统的总增益可以增加,从而低频增益随之增加,因此改善了系统的稳态精度。
- 滞后校正减小了带宽,因此系统具有较低的响应速度,但系统中包含的任何高频噪音都可以得到衰减。
- 滞后校正将会在原点附近引进极、零点组合(偶极子) ,这将会在瞬态响应中产生小振幅的长时间拖尾。
- 如果既需要获得快速响应特性,又需要良好的稳态精度,则可以采用滞后一超前校正。