4/6 线性系统的根轨迹法
本章研究一种分析和设计线性系统的图解方法-根轨迹法。首先研究闭环零、极点和开环零、极点的关系,得到根轨迹方程;其次给出以开环增益为可变参数时绘制根轨迹的基本法则;接着又给出以非开环增益为可变参数时绘制广义根轨迹的方法,讨论如何通过根轨迹定性地分析和定量地估算系统性能;最后介绍如何应用根轨迹法设计超前、滞后和超前-滞后控制器对系统进行校正,使其满足瞬态和稳态性能要求。
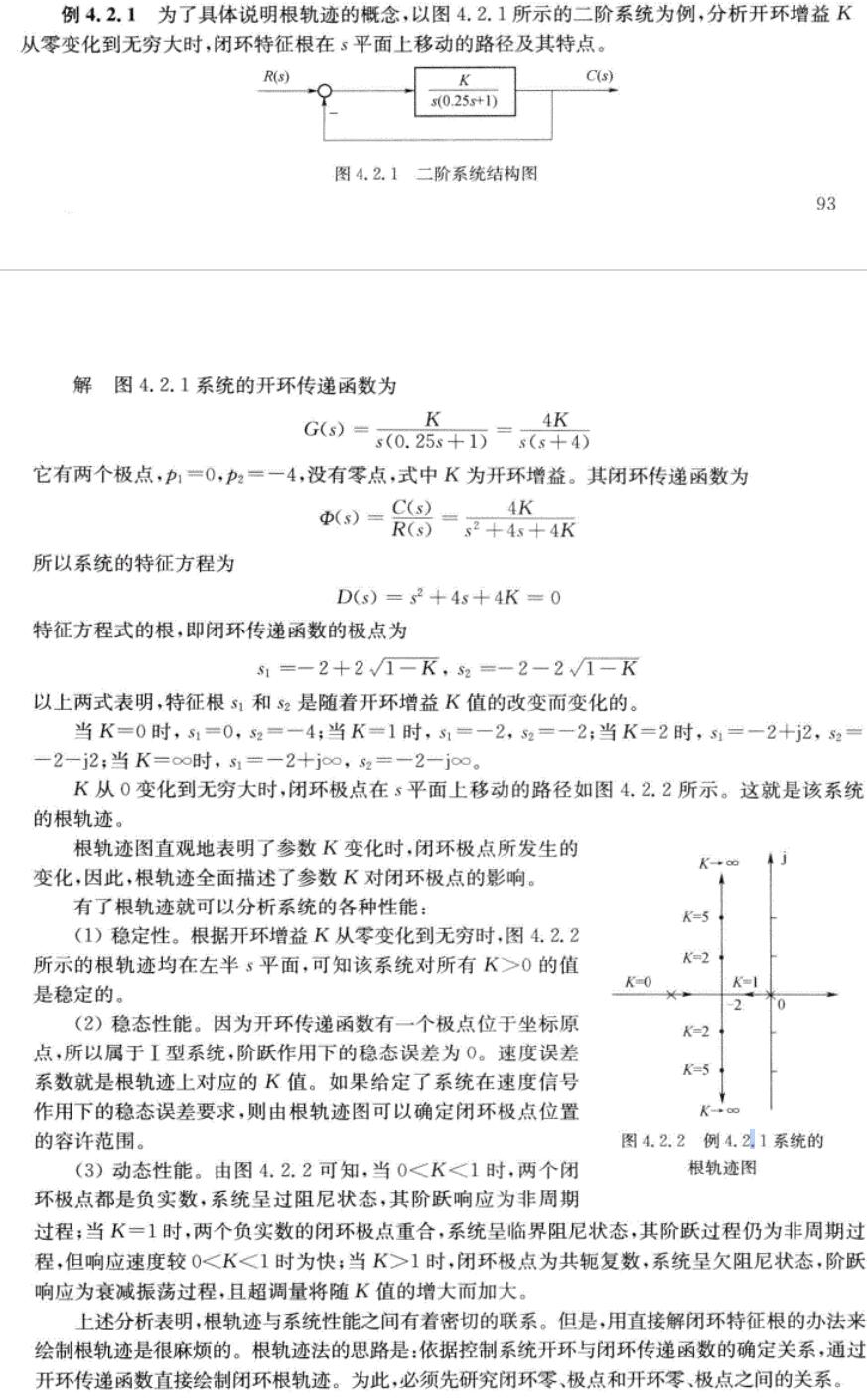
根轨迹法的基本概念
根轨迹是指当系统中某个参数(如开环增益K)从零变到无穷大时,闭环特征根在s平面上移动的轨迹。
在第二章中也曾介绍过,一般情况下,前向通道传递函数G(s)和反馈通道传递函数H(s)可分别表示为:
式中,K_G为前向通道增益(常数项的比值),K_G*为前向通道根轨迹增益,K_H*为反馈通道根轨迹增益,K*称为开环传递函数的根轨迹增益。
(1)闭环系统的根轨迹增益,等于开环系统前向通道的根轨迹增益;对于单位反馈系统,闭环系统的根轨迹增益就等于开环系统的根轨迹增益。
(2)闭环系统的零点由前向通道的零点和反馈通道的极点构成;对于单位反馈系统,闭环零点就是开环零点。
(3)闭环极点与开环零、极点及根轨迹增益均有关。
根轨迹法的基本任务就在于,如何由已知的开环零、极点分布,通过图解的方法,找出闭环极点的分布,并绘制出根轨迹。然后,根据给定的开环根轨迹增益,找出相应的闭环极点。一旦闭环极点确定之后,闭环传递函数的形式便完全确定,于是就可以分析和估算系统的性能了。
根轨迹方程
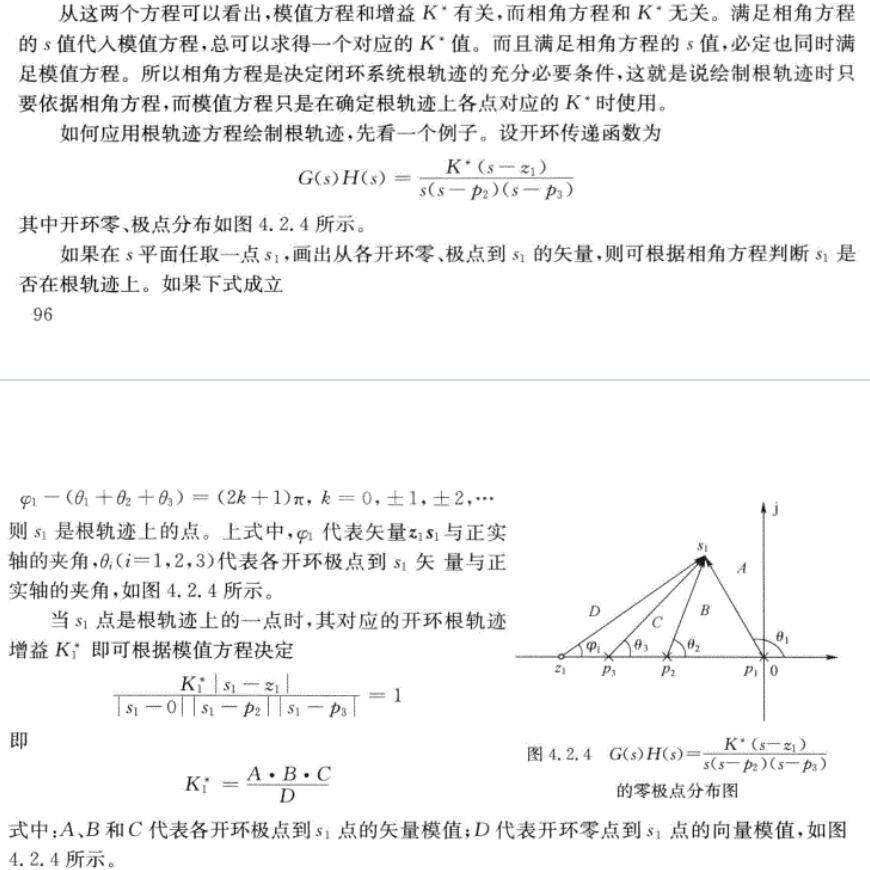
绘制根轨迹,实质上就是求闭环系统特征方程1+G(s)H(s)=0的根。假定开环传递函数中有m个零点和n个极点,用零,极点形式表示:
∠(s一z_i)表示开环零点指向闭环极点的向量与正实轴的夹角;∠(S—p_i)表示开环极点指向闭环极点的向量与正实轴的夹角。
综上所述,应用根轨迹方程绘制根轨迹的基本方法包括以下两步:
(1)在s平面上找到满足相角方程的所有点,并把这些点连成光滑曲线,即为K从0变到无穷时系统的根轨迹。
(2)针对开环传递函数中给定的K值,在根轨迹上找出满足模值方程的点,这就是所要求的闭环极点。
显然,在s平面上用这种逐点试探的方法绘制根轨迹是不现实的。实际上,根轨迹受某些规律的支配。Evans发现了这些规律,提出了一套绘制根轨迹的法则,从而使根轨迹的绘制工作大大简化。
根轨迹绘制的基本法则
- 根轨迹的分支数:根轨迹的分支数等于闭环特征方程的阶数n,或者说等于开环极点数n。
- 根轨迹的对称性:根轨迹对称于实轴。
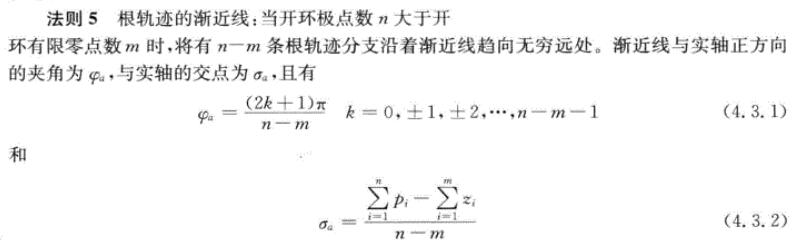
- 根轨迹的起点与终点:根轨迹起始于开环极点,终于开环零点。若开环零点数m小于开环极点数n,则有n一m条根轨迹分支终于无穷远处。
- 实轴上的根轨迹:在实轴上自右向左数,凡奇数零极点左边的一段实轴是根轨迹。
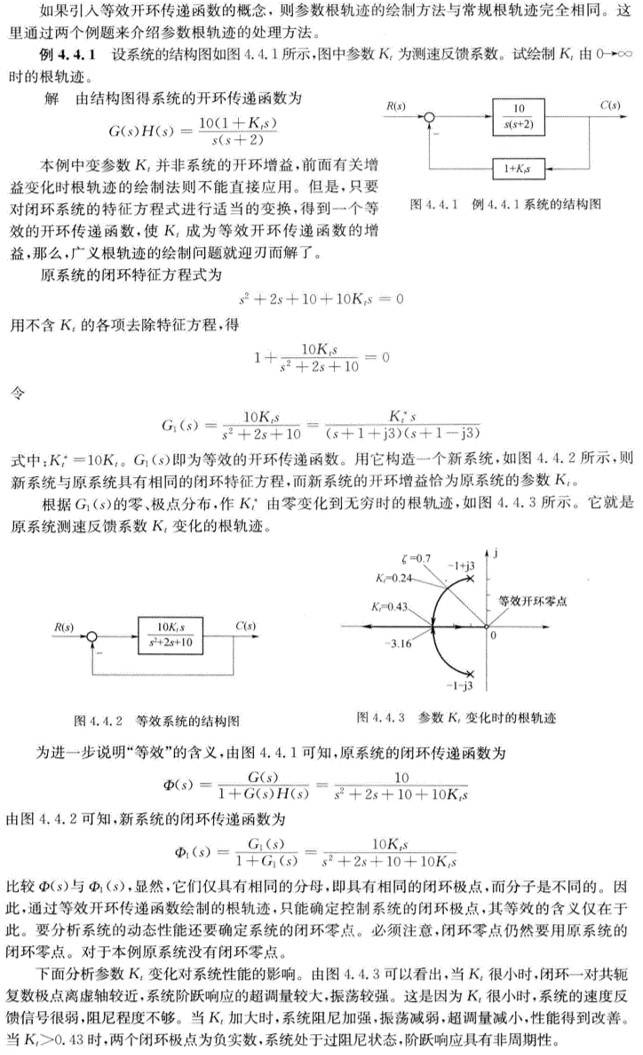
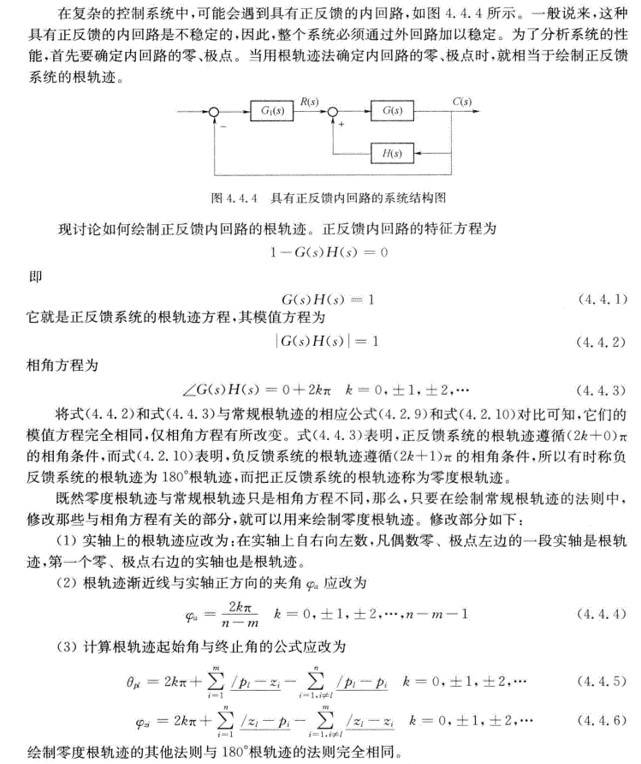
广义根轨迹
绘制系统的根轨迹,并非只能以开环增益K(或K*)为可变参数,它可以是控制系统中的任何一个参数,如开环某一极点或零点等。因此,在控制理论中,把以非开环增益K(或K*)为可变参数绘制的根轨迹称为广义根轨迹或参数根轨迹;而把以开环增益K(或K*)为可变参数绘制的根轨迹称为常规根轨迹。
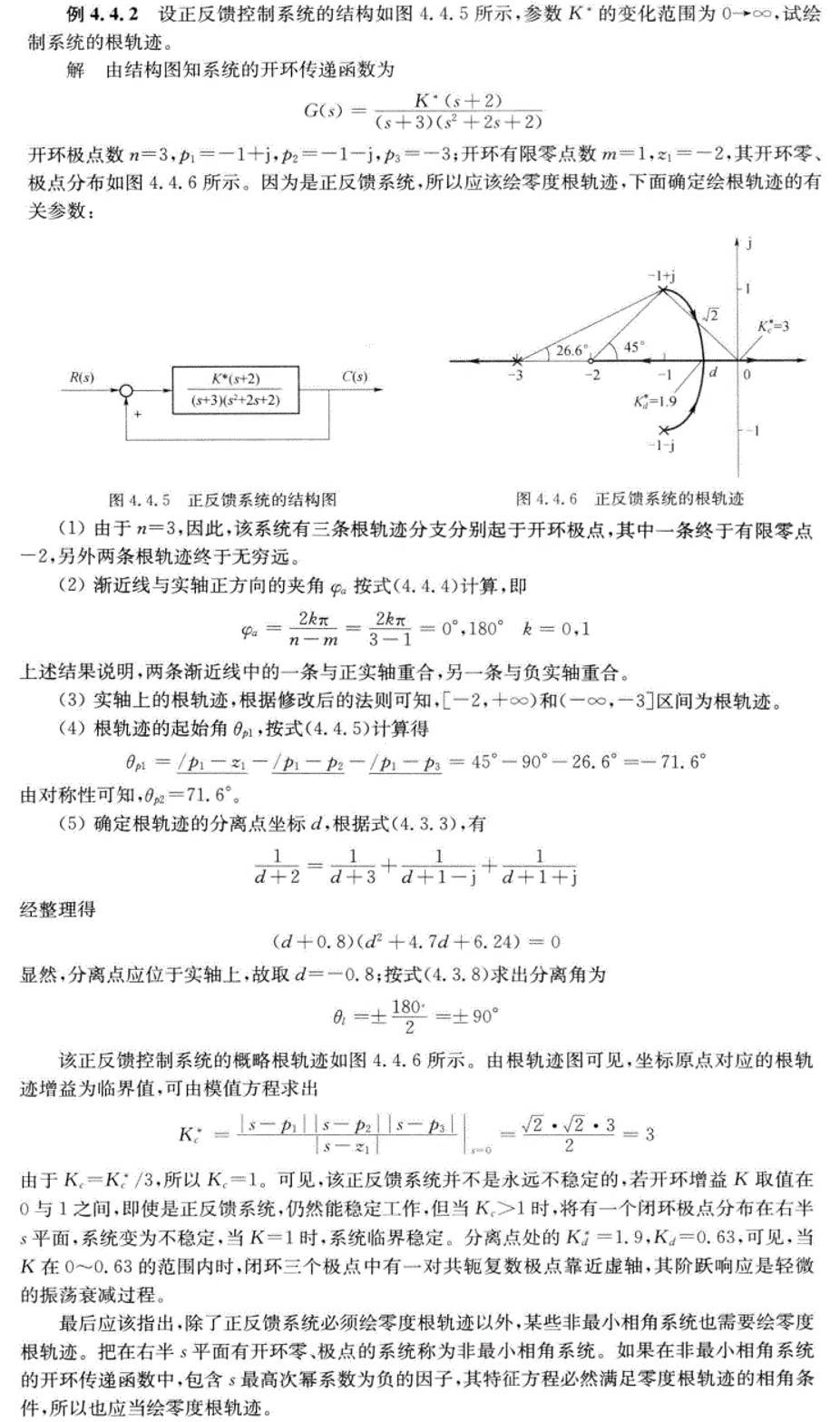
参数根轨迹
零度根轨迹
用根轨迹法分析系统性能
闭环极点对应的K值与性能分析
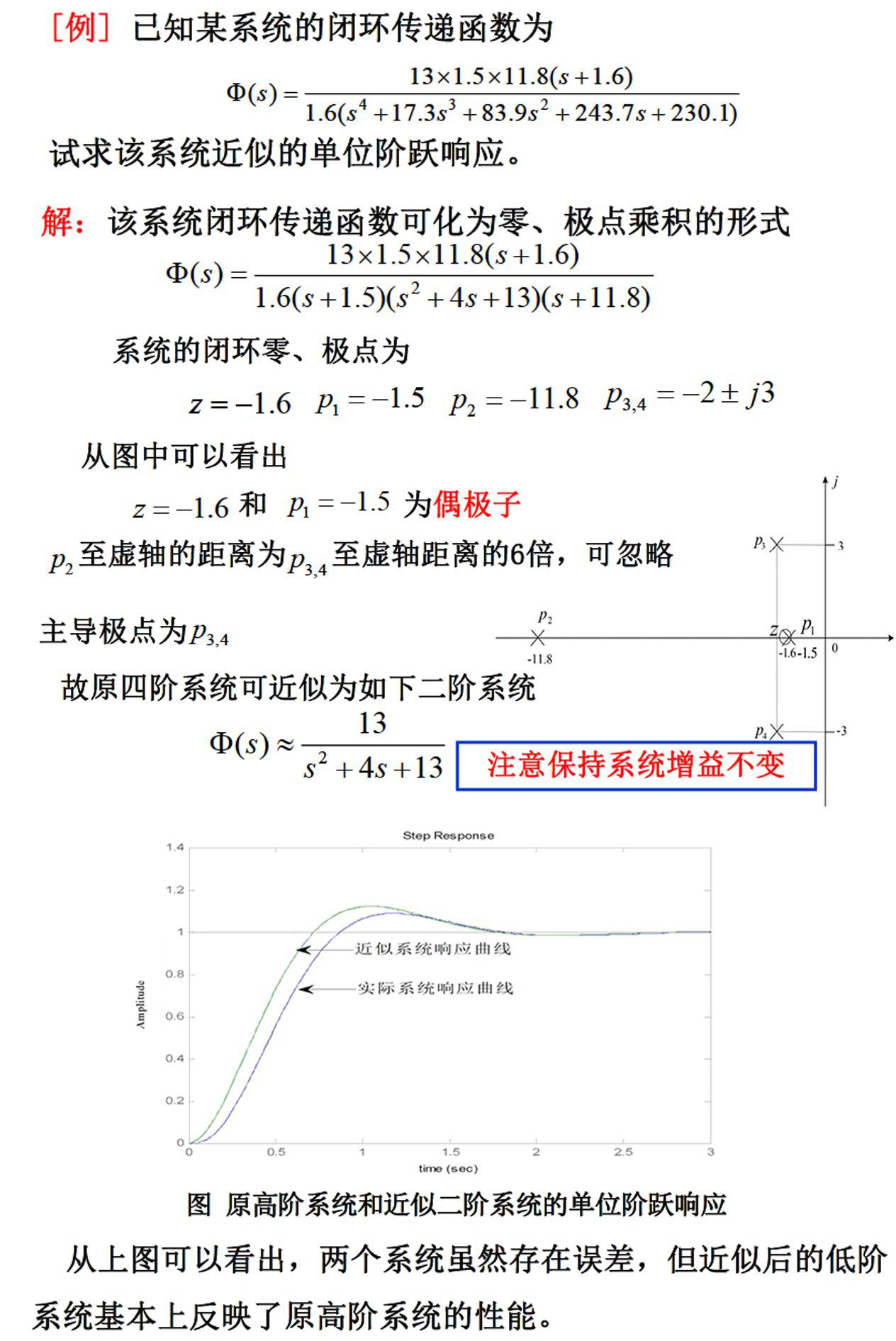
高阶系统的时域性能近似分析
主导极点:对系统响应的动态过程起主导作用的极点。
在高阶系统所有的闭环极点中:1)距离虚轴最近的极点,2)其周围没有闭环零点,3)且其它极点又远离虚轴,则它对系统的性能影响最大,称为主导极点。闭环主导极点可以是实数极点,也可以是复数极点,或是它们的组合。
偶极子:在高阶系统中,一对靠得很近的闭环零、极点,称为偶极子,它们对系统动态性能影响可忽略不计。
运用闭环主导极点和偶极子的概念,对高阶系统动态性能进行估算。
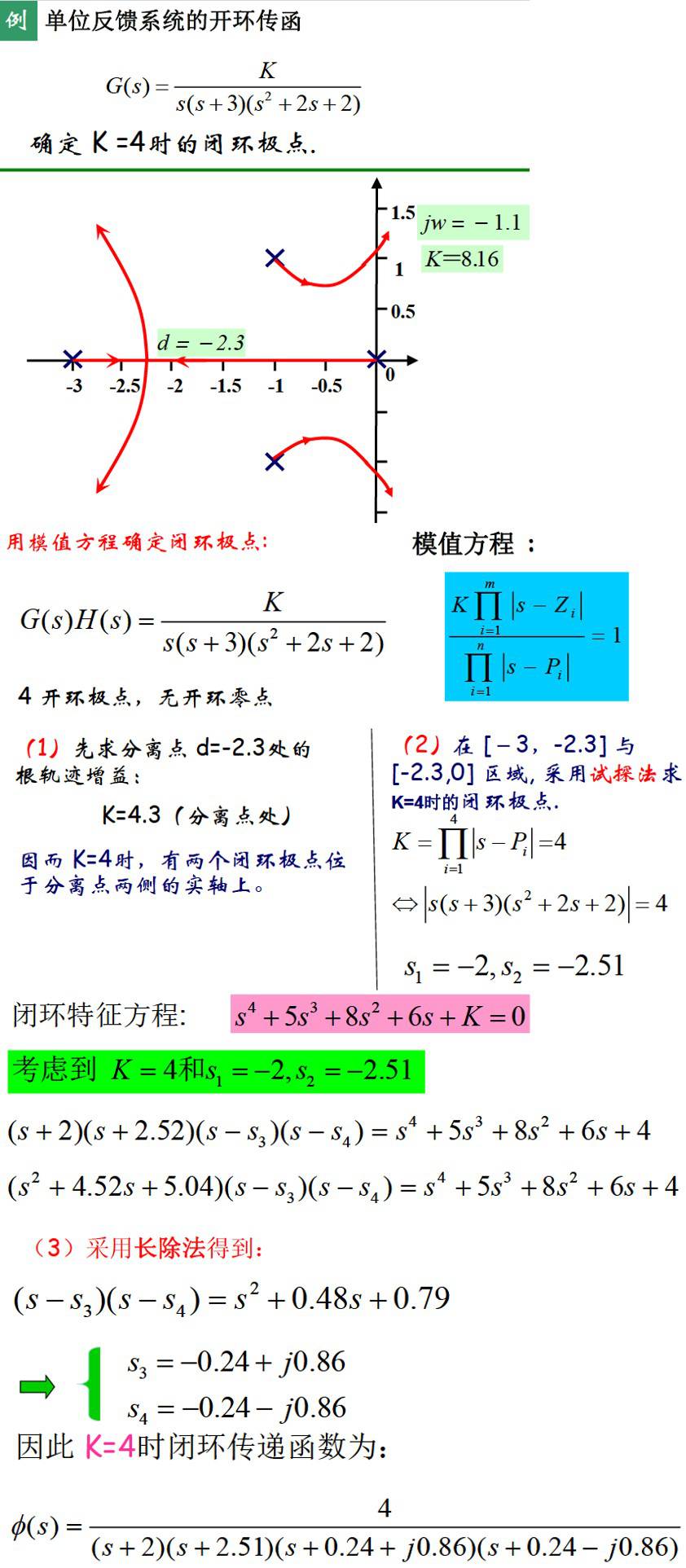
闭环极点的确定方法
根轨迹上的任何一点,都是对应于某一K*值的闭环极点。特定K*值对应的闭环极点,可以用模值条件和闭环特征方程求。
较简便的方法:
对于特定K*值的闭环极点,对模值方程使用试探法确定实轴上的闭环极点的数值,然后用综合除法(即长除法)等代数方法根据闭环特征方程确定其余的闭环极点。